LDH/UUV
Implementation, Simulation
Posted 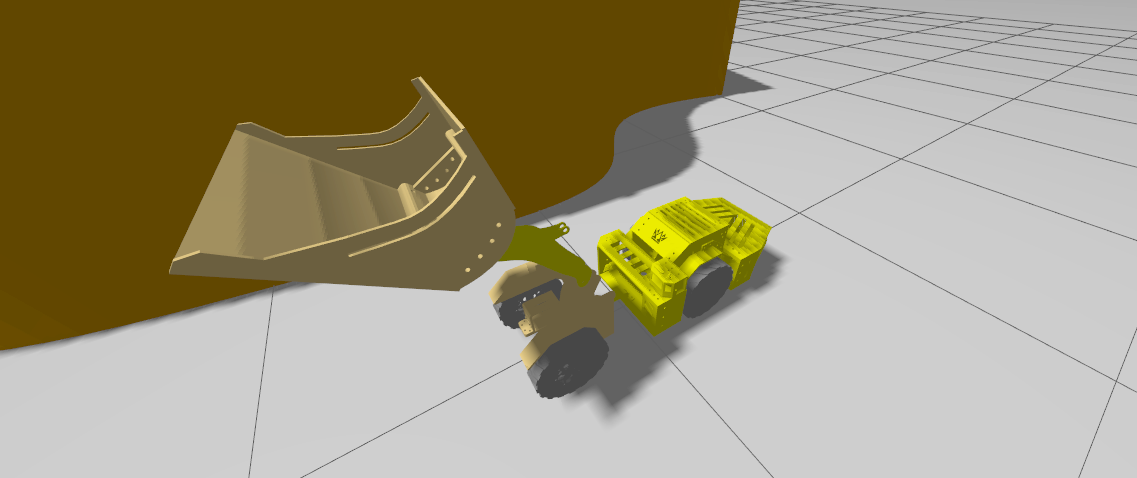
By
1 min read
LDH/UUV
Autonomous Load Haul Dumper: Design, Basic Implementation, in Simulation
A foundational framework, currently under development, for deployment on underground vehicles.
Current Progress:
Initial simulation environment established, featuring a functional client interface with verified autonomous traversal to target destinations.
ROS2 Based Controller
ROS2 based controller is implemented here for controlling the Wheel Velocities, and Pivot Joint of the LHD.
Simulation in Gazebo Simulator:
Overview
This video shows the following:
- LEFT: physics simulation
- RIGHT: visualization of position, and predicted trajectory using NMPC (green).
- A brief view of the client interface is shown at the begining where the target location is selected.
Technical Details
Hardware
- Currently non existent (In development)
Software
- Programming Language: Python, C++.
- Autonomy: Fully autonomous drive to Target site (static environment).
Source Code
The codebase for the project will not be made public due to institute regulations, however, the software stack used is listed below.
- ROS2:(python) Slam-toolbox, Nav2.
- Non-linear Model Predictive control(NMPC): casadi, numpy.
- Path planning: (python) basic A* implementation.
Acknowledgments
- CAD model: Shobit Verma
- Software: me
- Funding: IIT Dhanbad.
What’s Next?
A lot of cool stuff.
- Improving the code structure
- Implementing CNN based ore detection
- Automatic mining of detected coal
- Adding behaviour tree, for full functionality
- and more
This post is licensed under CC BY 4.0 by the author.