Dynamic Waste Collection Path Optimizer
Simulation

https://youtube.com/embed/AkaV2teI_iM
Dynamically Optimised Path Finding For Stationary Container Waste Collection System
This project implements a Brute Force approach to determine the optimal path, that a waste collection vehicle should take for a stationary container system. It uses a Physics based Model that accounts for:
- 3D distance along route
- frictional (road + braking), and gravity based energy losses
- dynamic weight changes, while driving due to:
- Continuous fuel consumption
- Weight change due to pickup of waste
Current Progress:
- Client interface for user to select target collection sites, and valid routes created.
- Simulation environment created.
- Testing of algorithm yielded satisfactory results.
Basic Overview of the work:
This project can be explained in 3 parts.
- metadata
- client interface
- path finding algorithm
Metadata
Inorder to use the client interface, we must provide
- the satellite raster elevation map of the land area under consideration. (necessary for correct physics calculations)
- the road map of the same area. (note: this is just an overlay, inorder to be able to easily identify the necessary locations)
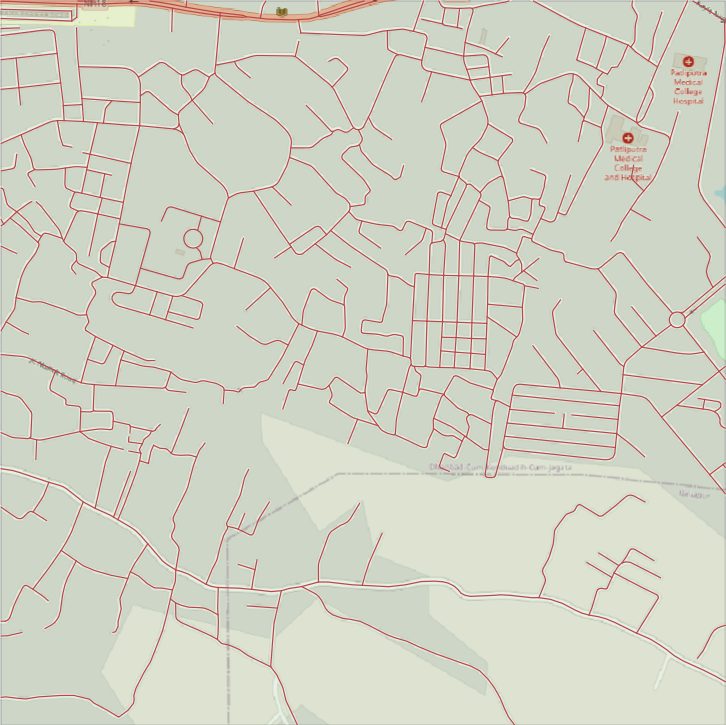
Fig. 1 Road Map of area
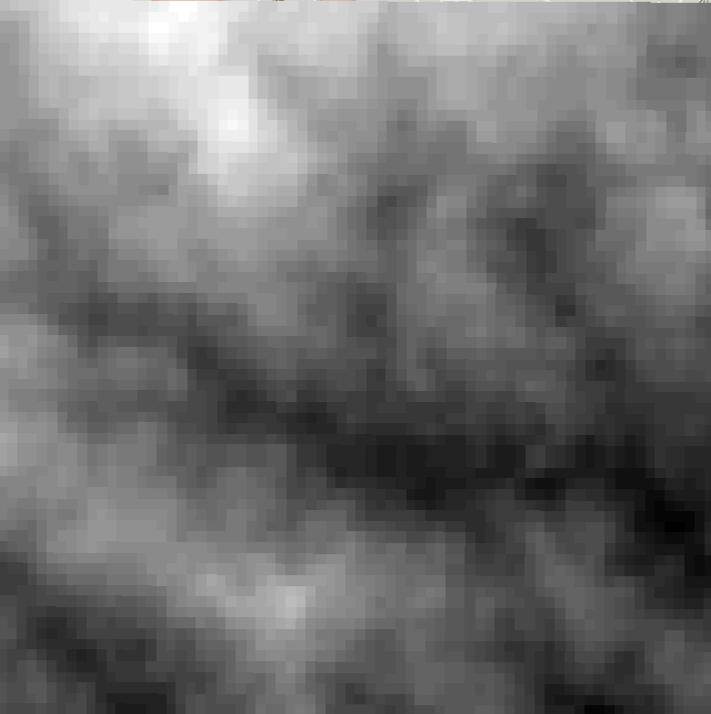
Fig. 2 Elevation Map of same area
Client Interface
The client interface shows the road map of the area. for usage of the interface, the user needs to:
- select Starting location, Target sites, and Disposal/MRF/Transfer station.
- select neighbors for each node.
- select various intermediate points between each node, and its neighbours.
Advantages of this setup: it allows us flexibility in choosing the routes, such as metalled roads. Also, for example, if a road between two nodes A, and B is 2-way-road, each of the two nodes (A,B) can be each others neighbours, but if it is a one way road, then only A will be a neighbour of B, or vice-versa.
Path Finding Algorithm (Technical Details)
The Path finding algorithm follows the structure of a branching tree, where each simluation step moves the disposal velicle to the next location.
- At the begining(start), the first step will be an intermediate node, from one of the neighbouring paths.
- If the vehicle reaches an intermediate node, the energy used in this step is calculated based of frictional loss, and gravity/braking. Then the fuel mass reduction is calculated based on energy spent an taking the step, calorific value of the fuel, and fuel effeciency of the truck.
- If the vehicle reaches a target Waste Collection site, then along with the above, the mass of the vehicle is also updated, and carried on throught the simulation.
- After any of these, the process carries on until any of the termination steps are reached. (branches that reach disposal/ are more ineffecient than previously conputed path/ exceed the fuel capacity).
Images and Video Demonstration
Steps:
- Set Collection sites, neighbors for each, and intermediate points. (you can see the feedback in bottom left of video).
- Set the required Target sites, along with associated waste quantity at those location.
- Run the simulation.(it will output the paths that take minimum, as well as maximum energy).
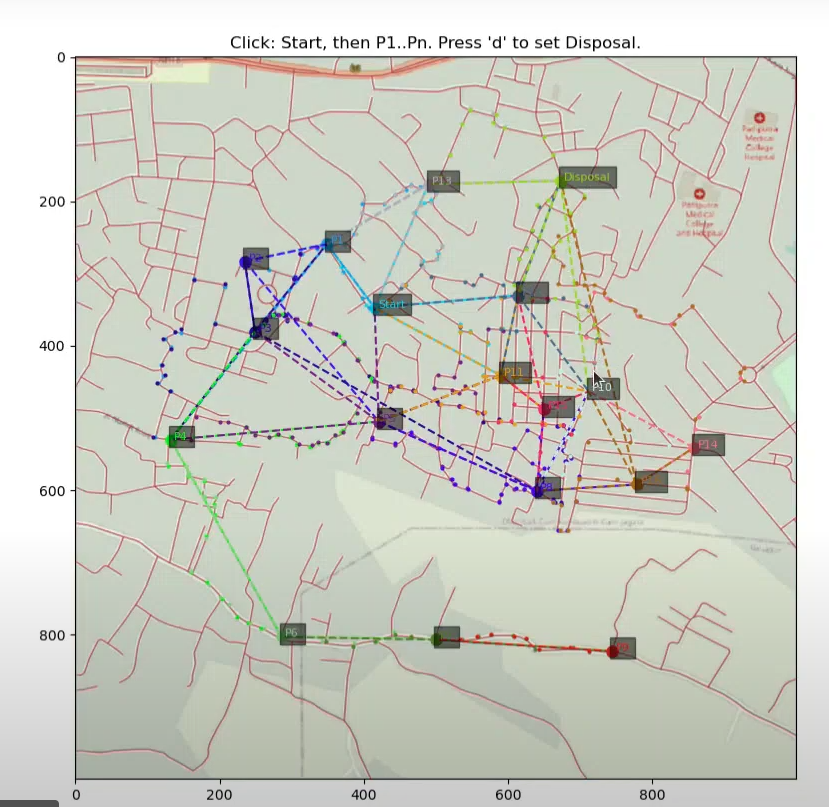
Fig. 3 Set Collection Sites, their neighbors, and intermediate path
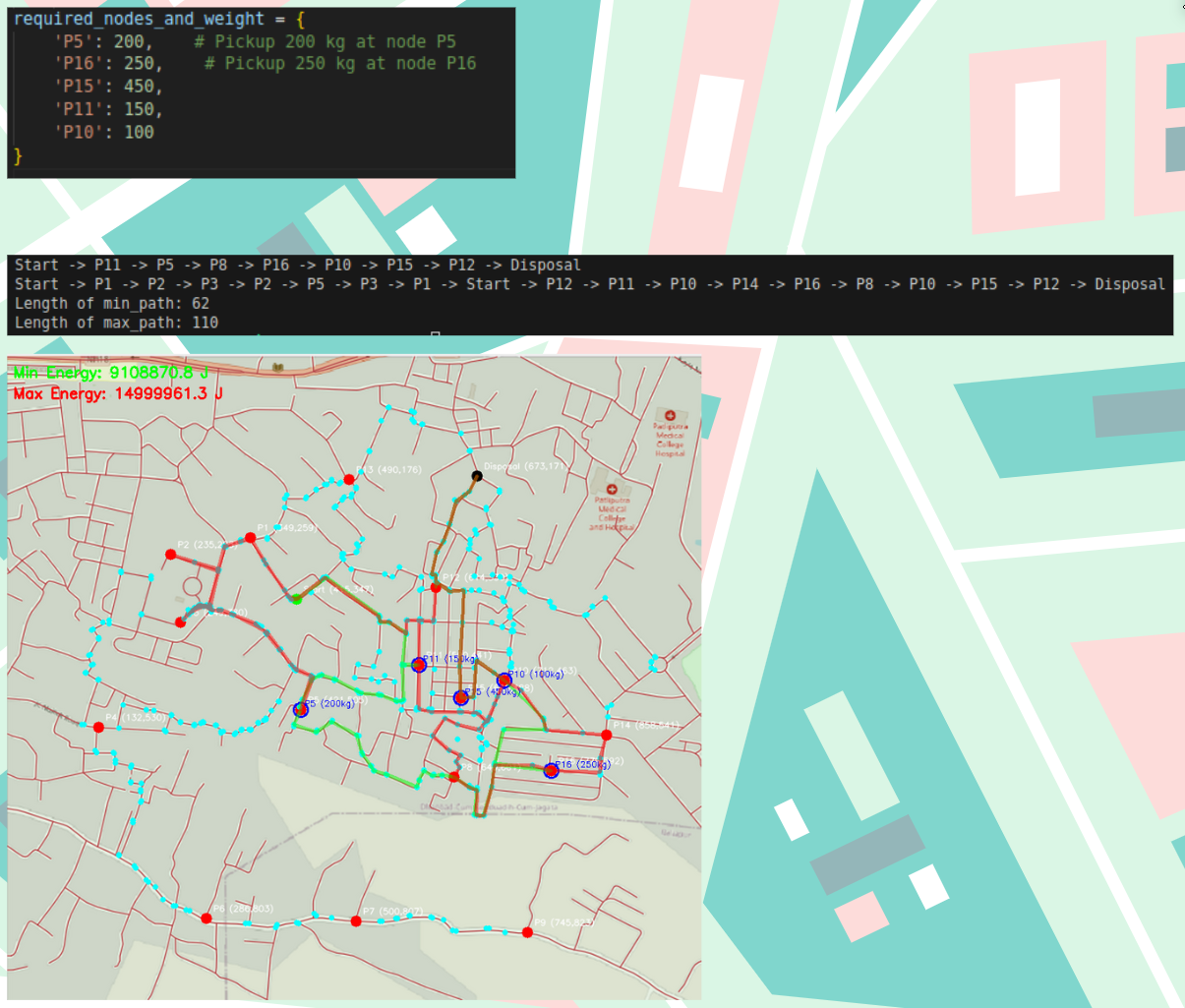
Fig. 4 Choose Targets Sites, and run simulator
Source Code
The complete codebase and documentation are available on GitHub
Acknowledgments
- me
What’s Next?
nothing for now