Wheeled Bipedal Robot
Design, Implementation, Simulation, Testing
Posted Updated 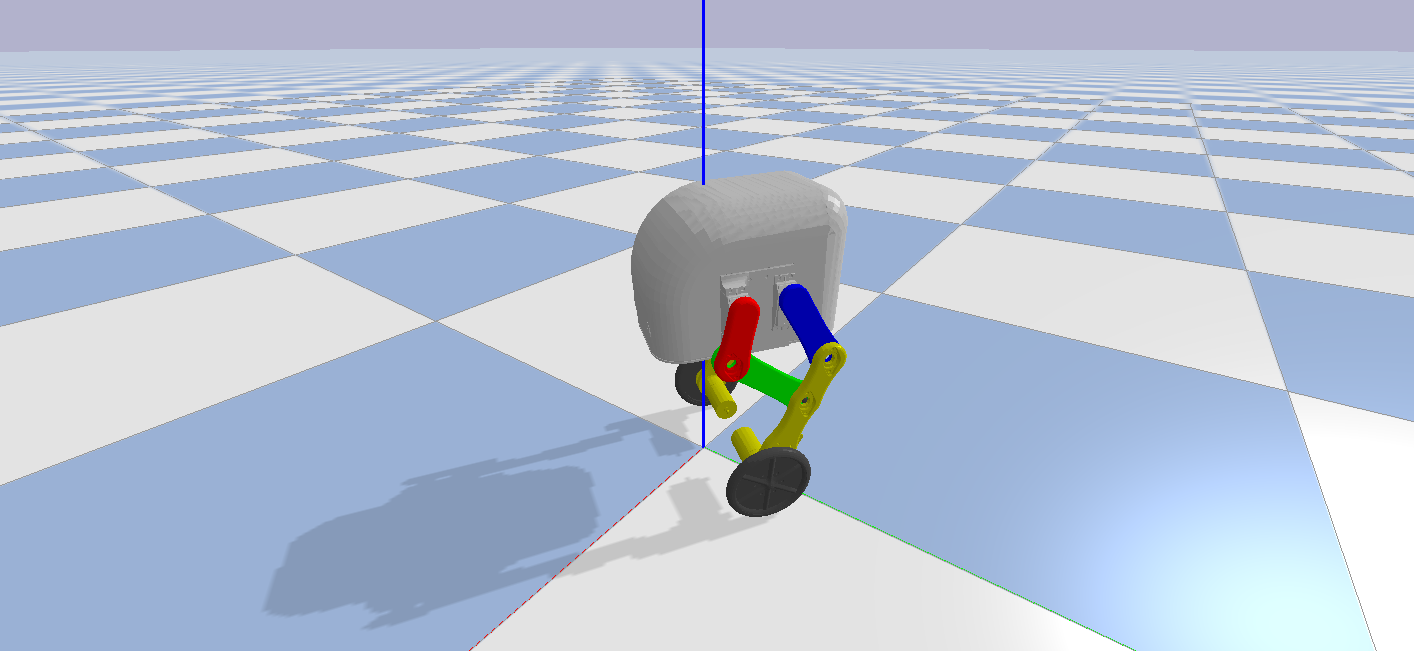
By
1 min read
Wheeled Bipedal Robot
LQR based Wheeled Bipedal Robot: Design, Implementation in Simulation
This project implements a Linear Quadratic Regulator (LQR) for a wheeled bipedal robot in simulation. As an optimal state-feedback controller, LQR utilizes a system model and offers improved performance over traditional PID controllers, ensuring better stability and control efficiency.
Current Progress:
- Simulation environment established in pybullet.
- Hardware has been acquired.
- Assembly and transfering simulation to real world is in progress.
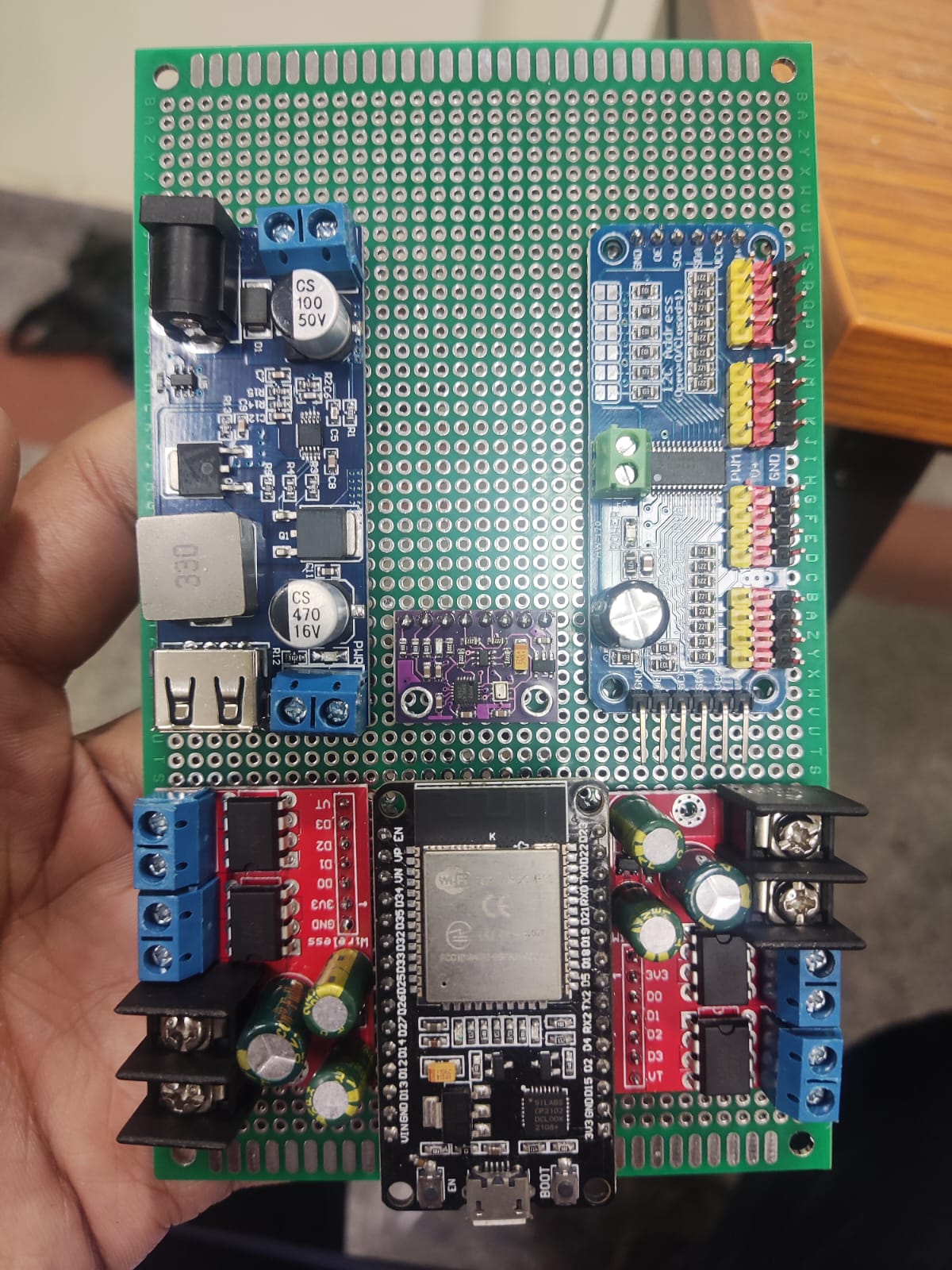
esp32 Based Controller
esp32 developmnet module has beeen used here, for all communication, and computational needs.
Simulation in PyBullet Simulator:
Basic Implementation (without white noise)
(with Filtered Gaussian Noise std:0.2)
Plots, of various filters implemented
Overview
- The 3 videos shown above display the implementations of LQR, in both perfect world, and real world scenarios.
- Real world scenario is achieved by adding gaussian noise to all sensor readings.
- 3 filters have been implemented, namely: low pass(exponential average) filter, moving average filter, and median filter. here: LPF + MA filter has been found to give best results.
Technical Details
Hardware
- In development



Software
- Programming Language: Python, embedded C.
Source Code
The complete codebase and documentation are available on GitHub
Acknowledgments
- Design, Software, Hardware, Electronics: me
- Funding: IIT Dhanbad
What’s Next?
A lot of cool stuff.
- Completion of hardware
- Tuning and Testing
This post is licensed under CC BY 4.0 by the author.