Hexapod POC
Design, Implementation, and Testing

Synchronized Hexapod: Proof of Concept
This project has been an immensely rewarding experience, teaching me essential skills like curve parametrization, 3D transformations, and inverse kinematics.
An additional highlight was developing an NRF24-based transmitter and receiver, showcasing the versatility of wireless systems.
Demonstration Video
Watch the Heexapod in action:
Project Overview
This was a project testing the limits of a simple (single core) microcontroller. Some cool features implemented in this Hexaod are
- Roll, and pitch control of the hull.
- Default body height adjustment.
- Complete 2D walk velocity vector control.
- Ability to switch between different walking patterns(gaits).
- Maximum step size, and height control.
- Wirerless Communication with the operator
This project combines mechanical design, and software algorithms, to achieve full autonomy.
Technical Details
Hardware
- Body and Legs: Custom-3D printed from PLA.
- Controller: Arduino Nano.
- Servos: MG995 Servo (11 Kg-cm torque)(180deg max)
Software
- Programming Language: Embedded C
- Autonomy: Wireless Teleoperation, Using Shock-Burst Protocol, and NRF24L01 RF Module.
Gallery
Figure 1: POC
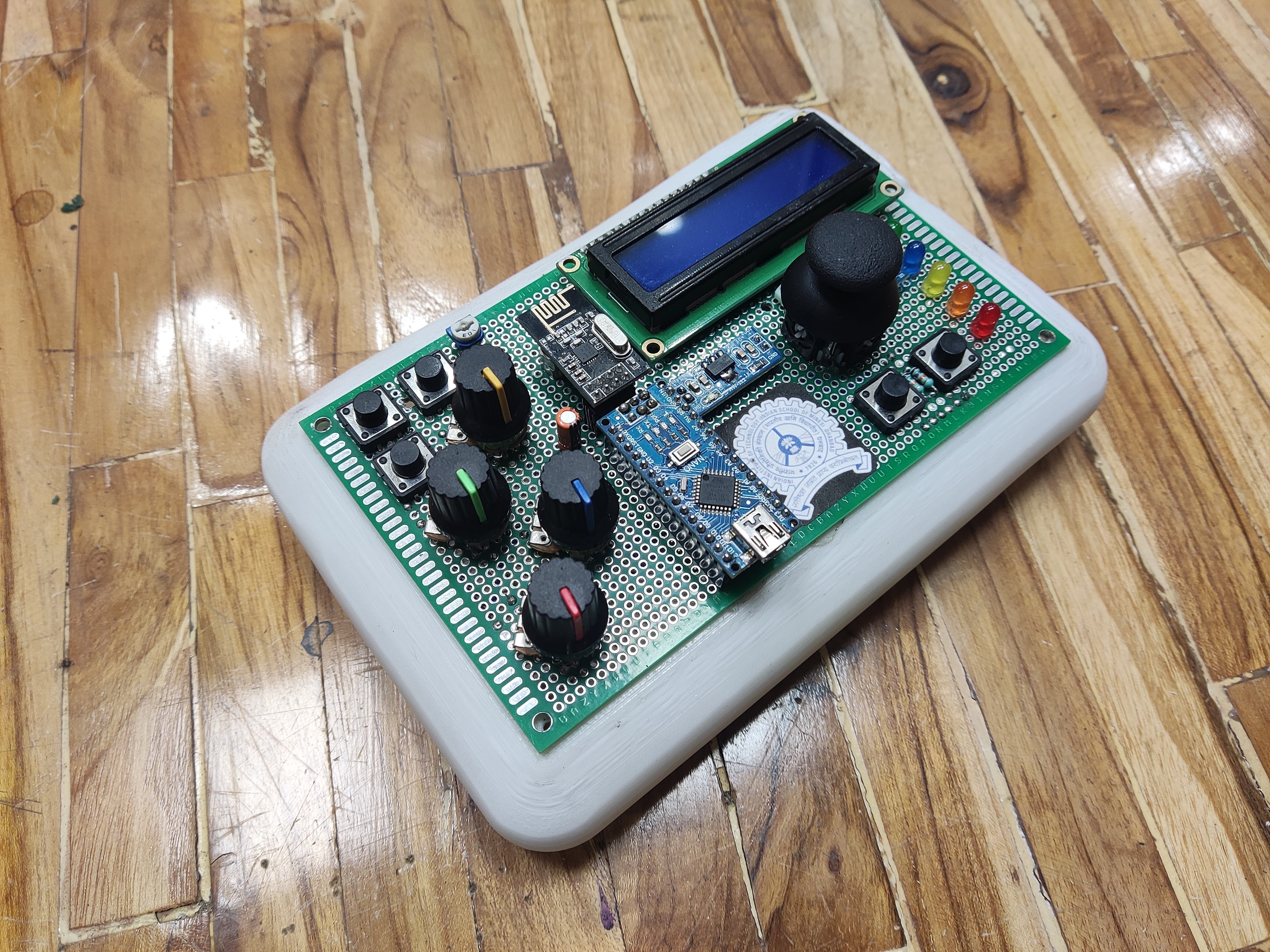
Figure 2: Remote Control
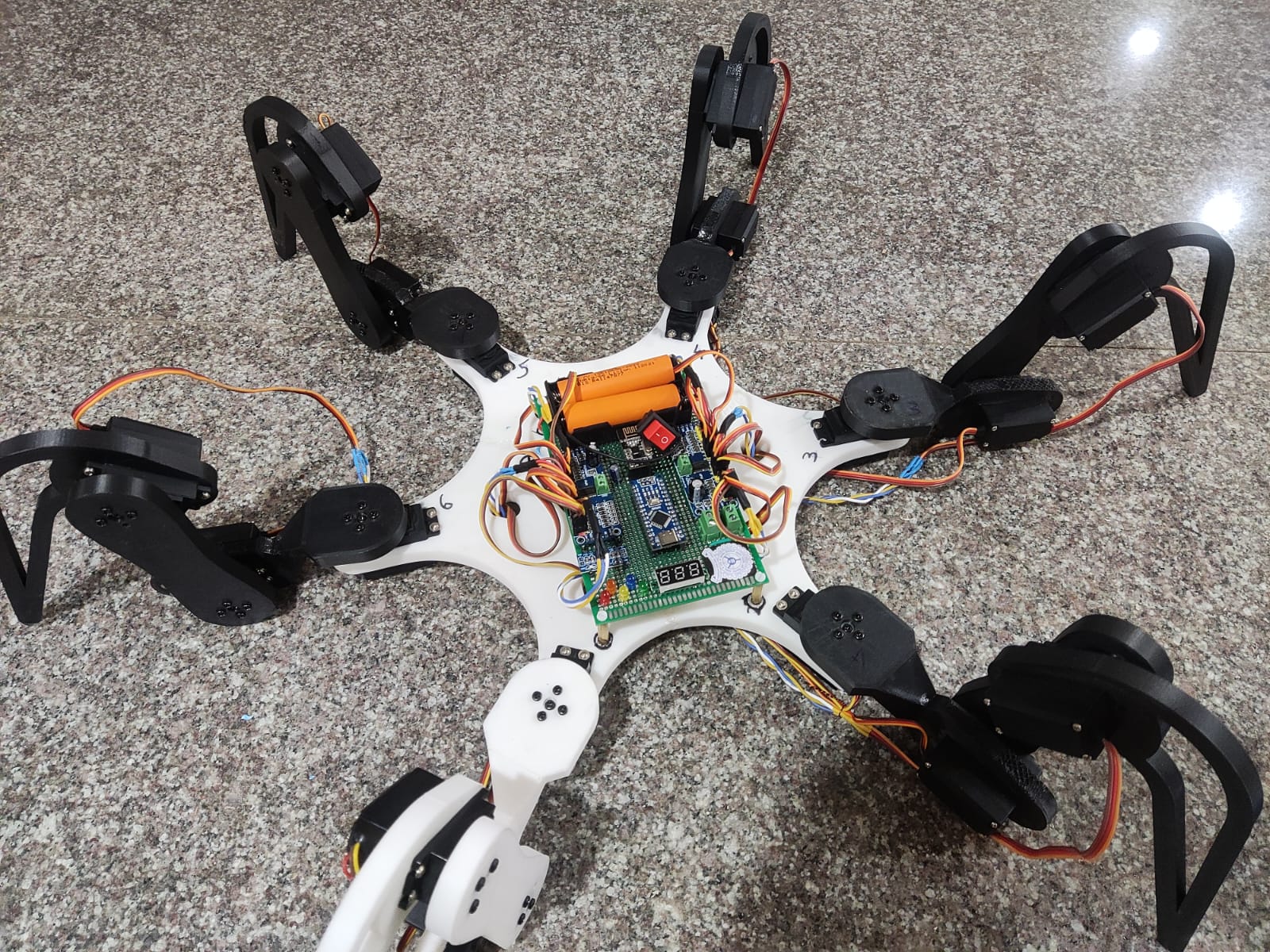
Figure 3: Insides
Figure 4: Test Setup
Source Code
The complete codebase and documentation are available on GitHub.
Acknowledgments
MySelf, Hardware Provided by IIT Dhanbad.
What’s Next?
I am currently working on a better hexapod. Since the arduino in to slow to handle the computational load, I will be using a raspberry-pi in the newer model. You can see the newer one in this post: Hexapod.