Unmanned Land Rover POC
Design, Implementation, and Testing

Unmanned Land Rover: Design, Implementation, and Testing
Creating an unmanned land rover has been an exciting and educational journey. This project, a collaboration with Prof. Shikha Singh, demonstrates how innovation and teamwork can solve real-world challenges in robotics.
Demonstration Video
Watch the rover in action:
Project Overview
The unmanned land rover was designed to:
- Navigate rough terrain.
- Use advanced sensor systems for monitoring its status, and environment.
- Demonstrate modular hardware and scalable software.
This project combines mechanical design, software algorithms, and sensor integration to achieve full autonomy.
Technical Details
Hardware
- Base Platform: Custom-built chassis - nothing special here
- Sensors: Inclination, ambient_temp, speed, weight, battery_level, battery temperature, time, battery_rating, charging_cycle, acceleration, battery_current, battery_voltage, humidity.
- Controller: Esp32 WROOM - Dual Antenna, + Arduino Nano.
Software
- Programming Language: Embedded C
- Autonomy: Wireless Teleoperation, Using Shock-Burst Protocol, and NRF24L01 RF Module.
- Website and database: PHP, MySQL, Hostgator(hosting service + database)
- Website for viewing Live Data(removed support by now): http://ioioioio.in/ind.php
Gallery
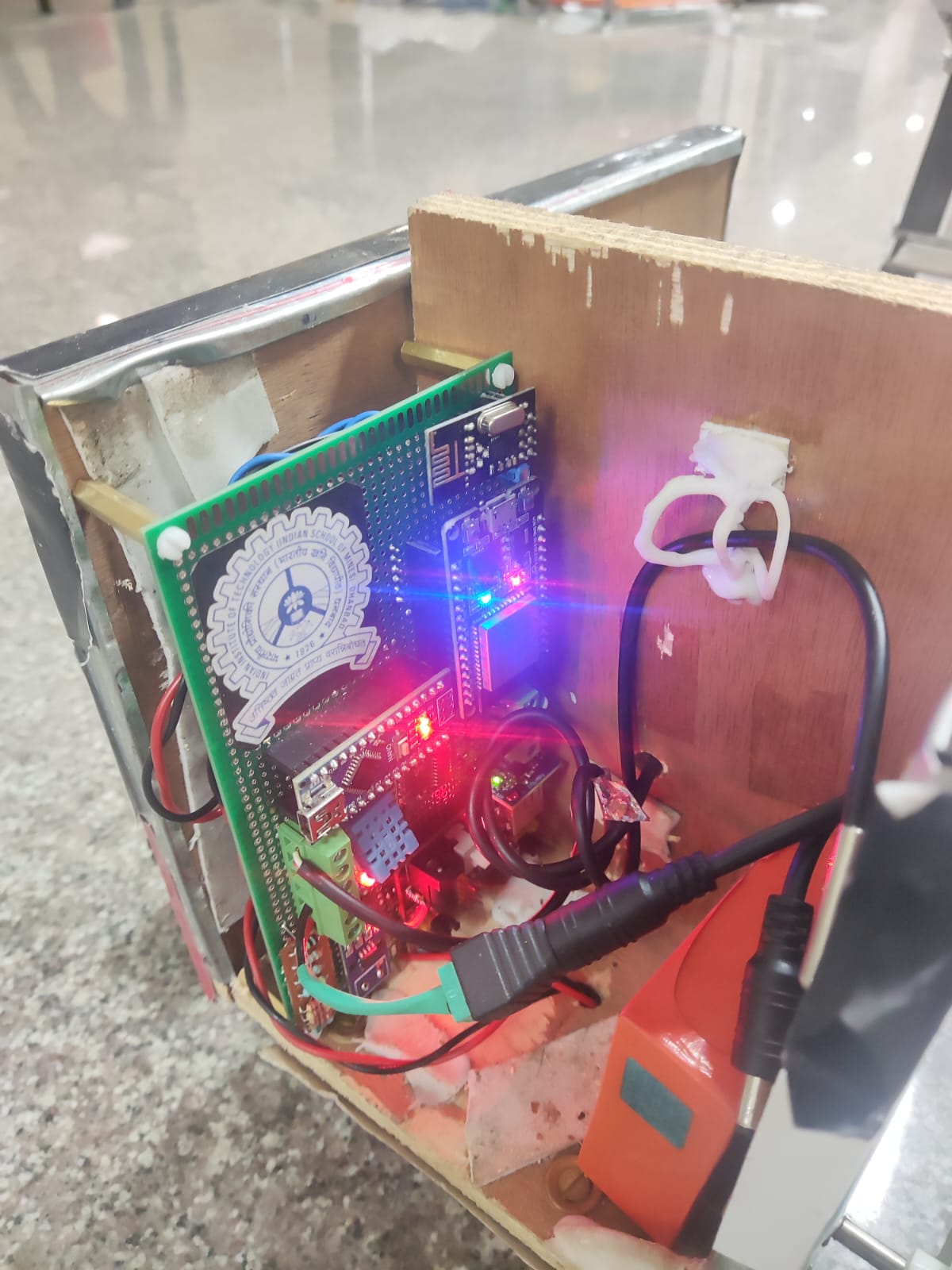
Figure 1: Rover prototype.
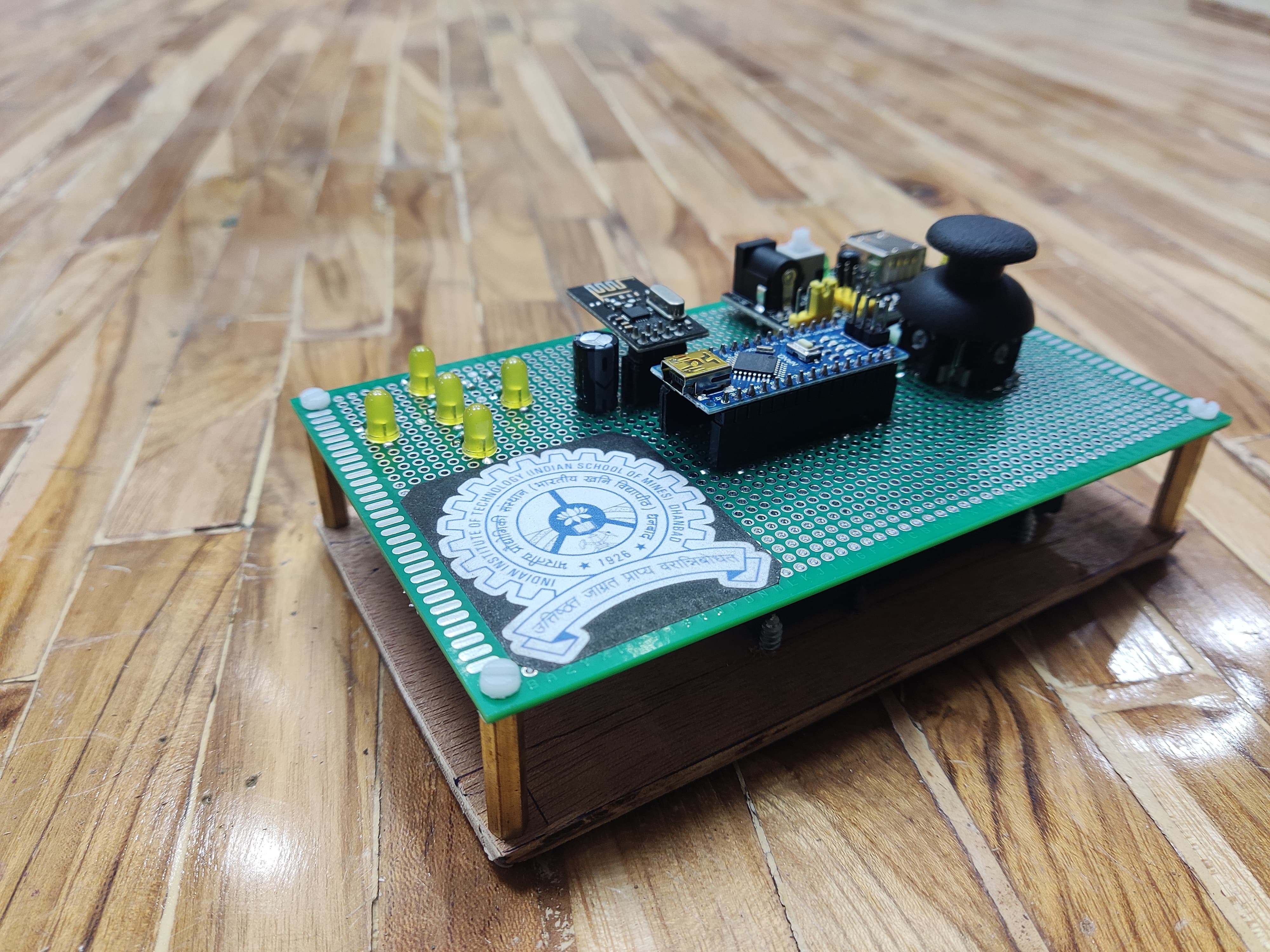
Figure 2: Remote Control.
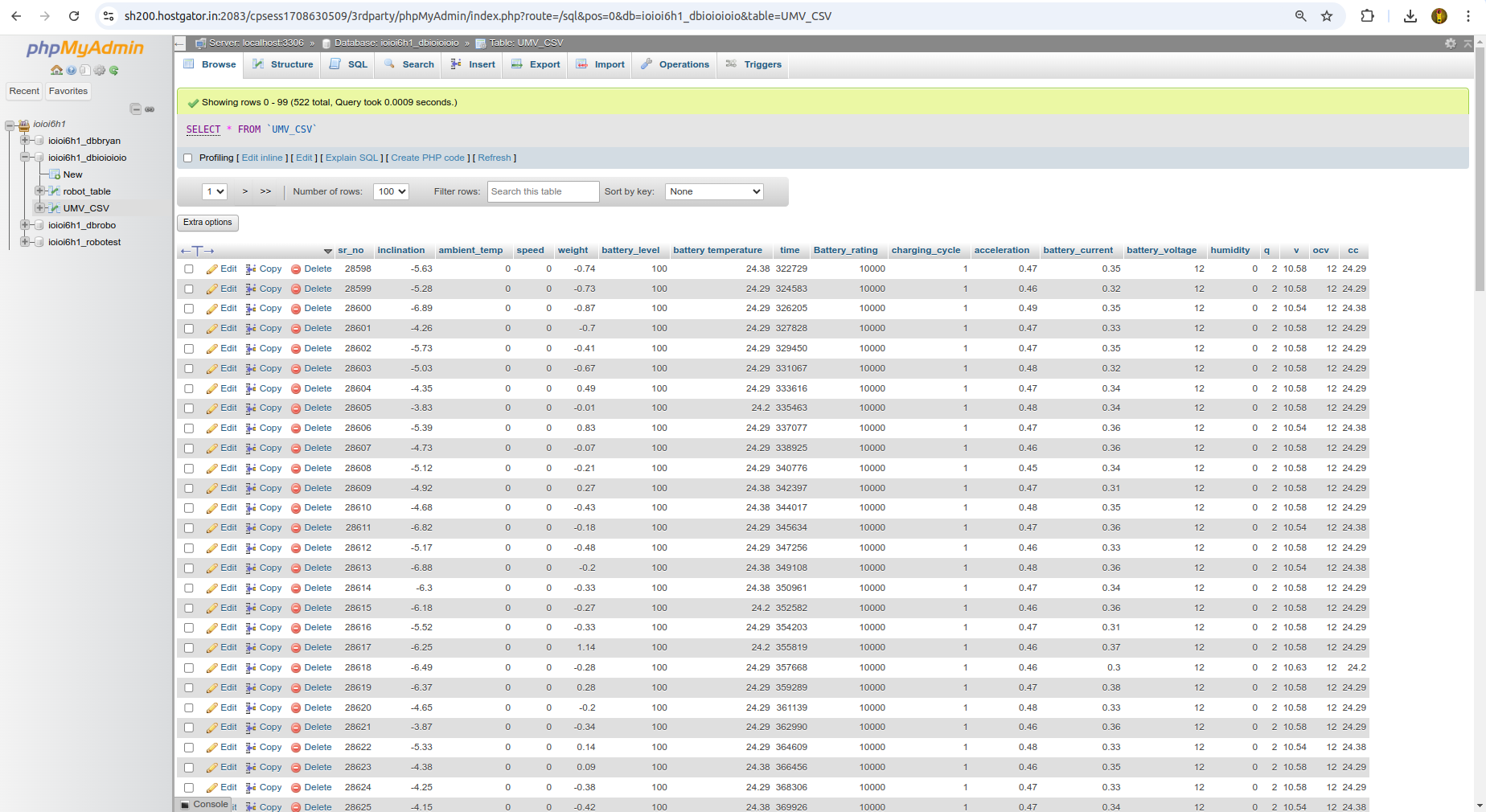
Figure 3: Stored Data.
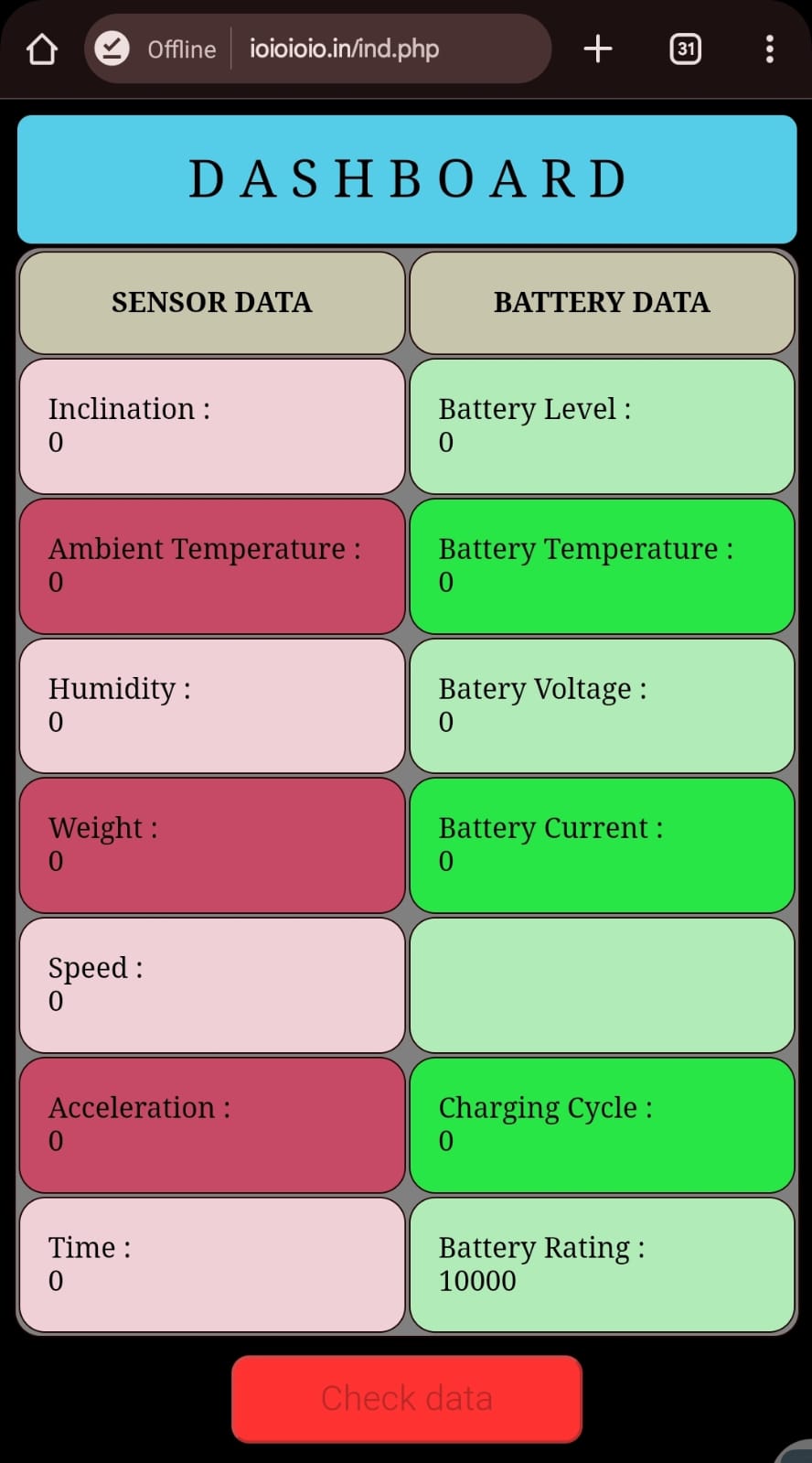
Figure 4: Live Data.
Source Code
The complete codebase and documentation are available on GitHub.
Acknowledgments
This project was made possible through the guidance and support of Prof. Shikha Singh. I am deeply grateful for her expertise and mentorship throughout the project.
What’s Next?
WUnfortunately, I will not be trying to update this Project, as my interests have shifted to legged robots as of now. However, it was still a great learning experience, and well worth the time and effort!